




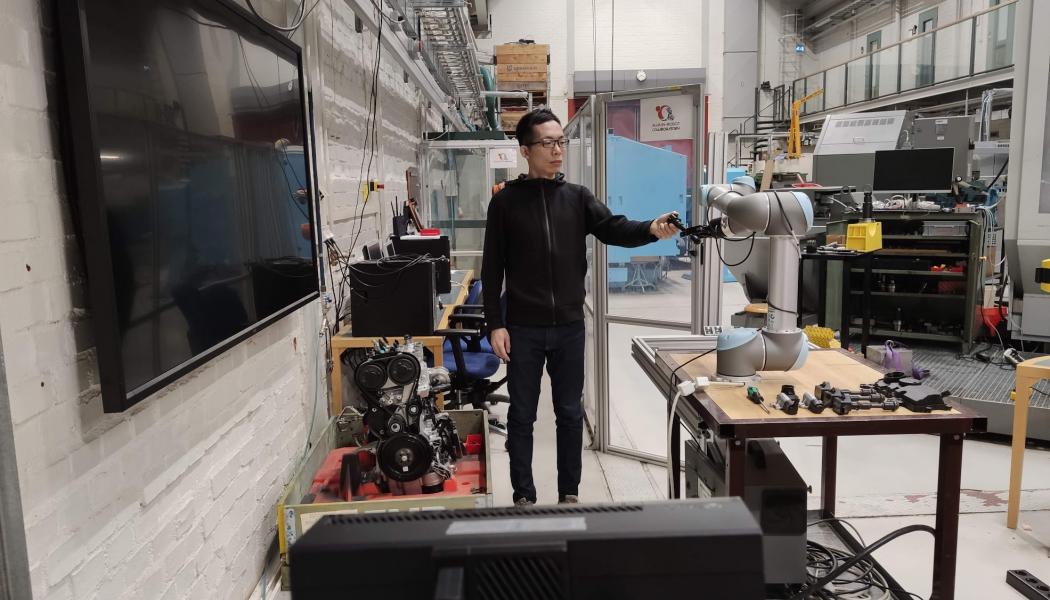
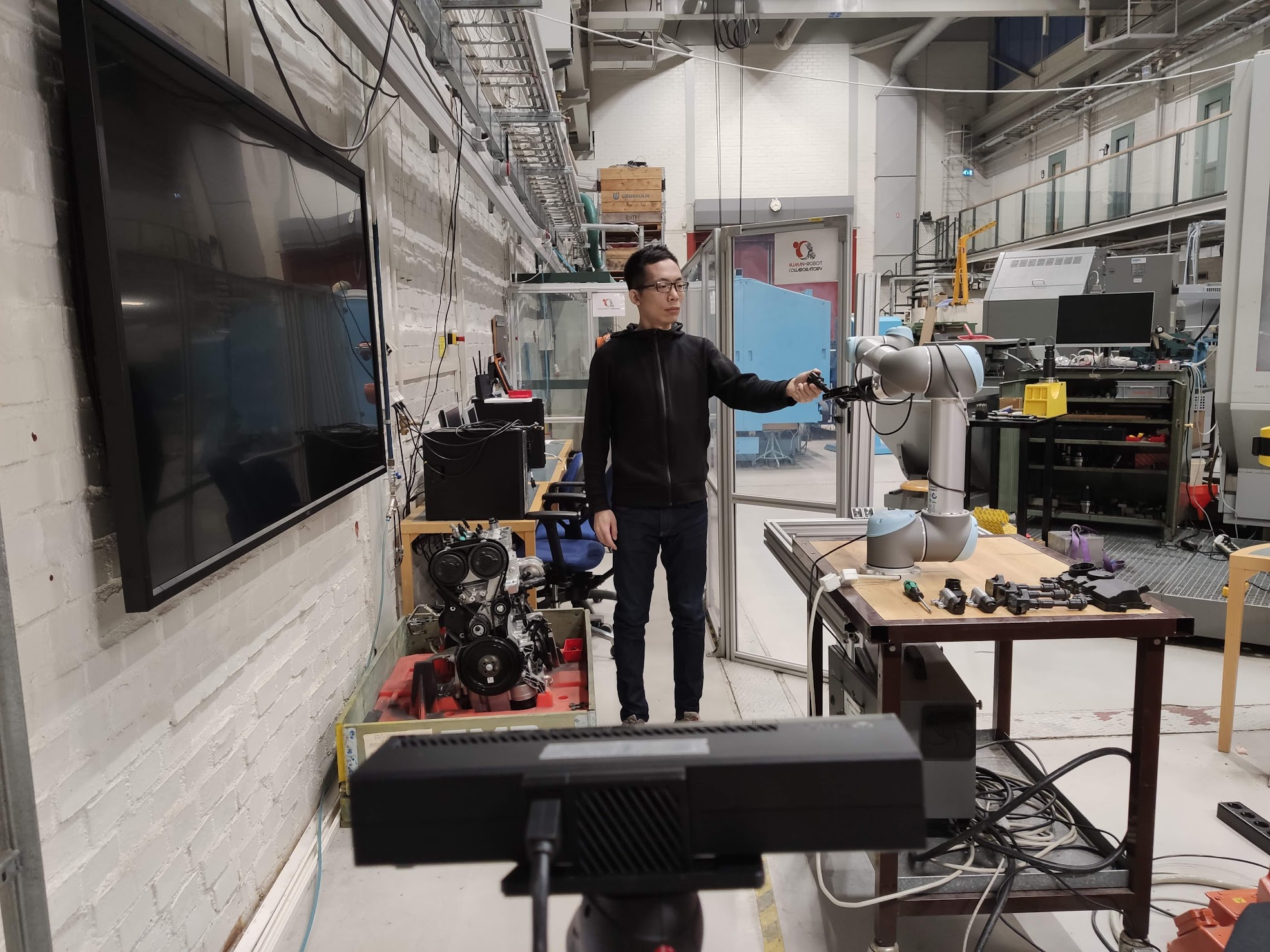
På KTH arbetar forskare med att studera och effektivisera samarbetet mellan robotar och människor. Fil. dr. och forskaren Hongyi Liu har särskilt fokuserat på att forska kring robotars kontextmedvetenhet, det vill säga hur kollaborativa robotar (cobotar) kan förstå sin omgivning och förutse människors rörelser med hjälp av cobotar från Universal Robots.
I ett nytt forskningsprojekt har Hongyi Liu studerat hur robotar ska kunna arbeta sida vid sida med människor och därmed kunna bli våra nya medarbetare.
– Kollaborativ automation är framtidens medarbetare. Vi ser redan nu att arbetskraften minskar på många håll inom många olika branscher, för att möta framtidens efterfrågan och behov kommer vi därför vara beroende av automation – inte bara inom industrin, säger Hongyi Liu i ett pressmeddelande.
Syftet med studien som Hongyi Liu arbetat med är att öka noggrannheten och effektiviteten i human-robot collaborative (HRC) monteringssystem. Tidigare har robotar bara kunnat bedöma avståndet till människor och saktat ner eller stannat när någon kommit nära, något som saktar ner produktionen. Men med hjälp av AI kan roboten nu identifiera personer den arbetar med, känna igen omgivning och kontext men även förutse vad som kommer hända härnäst.
Fortfarande återstår utmaningar innan roboten kan tas hela vägen från labbet till produktionen. Hongyi Liu menar dock att det inte längre handlar om tekniska utmaningar.
– Från ett forskningsperspektiv är i stort sett alla frågor och utmaningar lösta, eller i alla fall sånär som lösta. Men vi är trots det långt ifrån att kunna implementera denna teknik i våra verksamheter då standardiseringen ligger långt efter.








































































{kind=link}